

Entertainment Robotics
In addition to their traditional research and humanistic purposes, robots can also be entertaining. One just need to bring them to life! Here are some examples.
Select your topic:
Human-Robot Interaction
Human-Robot Interaction
The story of iCub:
|
 
|
Interactive Live Demonstrations
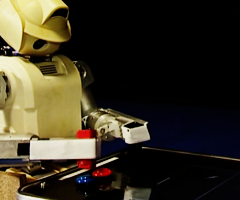
Pong, the Robot EditionThis entertainment-centered application shows another type of interaction between a human and a robot. The arcade game "Pong" is given a new dimension thanks to the presence of a robot. (video) Rather than playing alone, the human player faces now a robot, which reacts according to the state of the game. Through appropriate speech dialogs and gestures, it engages the user in a fierce competition. Several disturbing techniques are included. Technically, the robot is connected to the game and hence knows the current state of the game. However, to provide a real interaction experience, the robot effectively acts on the joystick and buttons, and perform eyes-tracking of the ball on the screen. Thus, a predictive model has been implemented to handle the latency due the robot's movement dynamics. This model is trained during a preliminary phase, where the robot plays the game alone to optimize its movements by self-calibration.
"HRI-Robot challenge" |
|
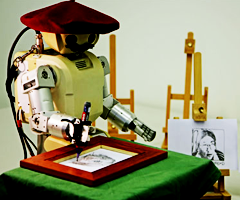
The Portraitist RobotSalvador DaBot, so-called by its fathers due to its fancy moustache and beret add-ons, is an artist who draws portraits of the people it meets. Such an expensive printer has the advantage of using a real pencil, providing to its customers the impression of a real drawing experience, which it is! (video) Technically, the robot captures a photo using its integrated web-cams, extracts the contours of the face, and then computes strokes to render nice shades of grey. Moreover, rather than drawing horizontal lines as a normal printer would usually do, Salvador first draws contours, then surfaces, one after the others, which looks more natural. Finally, because of its well-known artistic talents, Salvador DaBot was invited to several prestigious places around the world, where it spent hours drawing and used many pencils to realize masterpieces of the guests invited to these events.
"Google Zeitgeist'08"
"Campus Party" |
|
Exhibitions in Museums
Robota 2 plays ping-pongIn this exhibition, Robota 2, a little humanoid robot built at EPFL, explains to the visitors how difficult it is to be a robot, how difficult it is to execute actions when not programmed to. Robota further requests the help from humans to learn how to hit a ping-pong ball. Along a guided explanation of what are the current issues of control and learning in robotics, the visitor is taught how to teach the robot to play ping-pong. As for humans, a good robot learner requires a good teacher. (video)
Exhibition: "Corpo, Automni, Robot" |
 |
Robota learns to dance by imitationIn years 2100, humans have been sent to explore the universe and to travel in outer-space. Our Robota has been sent with them in order to provide them with some interactions during their journey. In this exhibition, visitors are taught to teach Robota by imitation how to dance on several type of music. Through the use of its cameras, Robota can perceive the movements of human users, and then learn to imitate their movements.
Exhibition: "Mission Biospace"
Exhibition: "Esprit es-tu là?" |

|
Just for Fun
The Dancing RobotThis application was initially a showcase of the capabilities of the robot controller, that combines several task goals through a hierarchical inverse kinematics system. This system was developed to coordinate the motion of each joint in order simultaneously track desired trajectories in Cartesian space imposed for each effector, e.g., the hands, legs, head and rump, as well as the center of mass so as to handle the stability of the robot. To showcase the performance of system (and also because it was fun...), the robot was then brought to various places of Switzerland. And we made a touristic video. Moreover, during a robotics conference in California, as the result of a spontaneous and improvised collaboration with the creators of the Keepon robot, our dancer and Keepon developed a form of friendship, crashed a party together, got into a conference room and invaded mars... (video)
Presented during one week at the |


|