

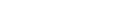
RobotToolKit
RobotToolKit is an open-source robot simulator targeted at researchers and robot hackers.
The first official release of the simulator was released around June 2011.
The current version, maintained by the LASA-team can now be found on github here.
Features
- Fully open-source C++ code
- Physics simulation, Real-time 3D rendering
- Customizable environment and robots
- Modular architecture for programming robot controllers and environment and object behaviors
- Robot models:
Barrett WAM Arm,
iCub,
Fujitsu's Hoap-3
- Plug-n-play interface to real platforms:
Barrett WAM Arm.
Interfaces to the iCub robot and to the ROS platform are currently under development
- Example codes
- Research packages of the work done at LASA-EPFL
- And more...
Acknowledgments
Many thanks to all people that have been testing, debugging, improving and using this software:
Florent D'halluin, Klas Kronander, Mohammad Khansari,
Elena Gribovskaya, Dan Grollman, Martin Duvanel,
Seungsu Kim, Sarah Degallier, Ashwini Shukla, Sylvain Calinon,
Jérome Sovilla, Lauren Blanchet, Christophe Paccolat
and particularly Prof. Aude Billard who supported this project.